Arduino con servomotore
Usando Arduino con i servomotori possiamo controllare con precisione la sua posizione dell'albero perché i servomotori lavorano su un meccanismo di feedback per determinare la sua posizione dell'albero. La posizione dell'albero viene costantemente misurata con un potenziometro integrato all'interno del servomotore che la confronta con la posizione target impostata dal microcontrollore (ad es. Arduino). Calcolando l'errore tra la posizione target e la posizione effettiva, il microcontrollore regola il suo albero di uscita in modo che corrisponda alla posizione target. L'intero sistema può essere descritto come a sistema a circuito chiuso .
Arduino controlla i servomotori utilizzando un segnale PWM. Questo segnale di controllo viene inviato al pin di controllo del servomotore. La larghezza del segnale PWM determina la posizione dell'albero. La tabella seguente fornisce un'illustrazione del controllo della posizione del servomotore utilizzando il segnale PWM
| Larghezza PWM (ms) | Posizione dell'albero (angolo) |
|---|---|
| 1 ms | 0˚ gradi Min |
| 1,5 ms | 90° gradi Neutro |
| 2 ms | 180° gradi max |
I servomotori generalmente necessitano di un impulso PWM ogni 20 ms o 50 Hz. La maggior parte dei servomotori RC può funzionare bene in un intervallo da 40 a 200 Hz.
Perni del servomotore
La maggior parte dei servomotori utilizzati con Arduino ha tre pin.
- Terra I servomotori hanno un pin GND che normalmente è di colore nero.
- Spina di alimentazione È necessario un pin 5v per alimentare il servomotore. Il pin di alimentazione è solitamente di colore rosso.
- Perno di controllo Il movimento dell'albero del servomotore è controllato tramite il perno di controllo. Questo pin è collegato a un pin digitale Arduino.
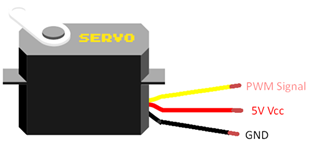
I servomotori hanno diverse combinazioni di colori disponibili, ma la buona notizia è che tutti i servomotori hanno i pin di solito nello stesso ordine, solo la codifica a colori è diversa.
Wire Servo con Arduino
La maggior parte dei servomotori funziona a 5V. Per alimentare il servo con Arduino, dobbiamo collegare un pin 5V di Arduino al pin di alimentazione del servo. Arduino ha una gamma limitata per il prelievo di corrente. Di solito, uno o due motori possono essere collegati ad Arduino. Per controllare più servomotori utilizzando Arduino, dobbiamo alimentarli utilizzando un'alimentazione esterna.
Tenere presente la seguente configurazione dei pin durante l'alimentazione del servo:
| Perno del servomotore | Pin Arduino |
|---|---|
| Potenza (rosso) | Pin 5V o alimentazione esterna |
| Terra (nero o marrone) | Alimentazione e Arduino GND |
| Perno di controllo (giallo, arancione o bianco) | Pin digitale di Arduino |
Per collegare servomotori con Arduino sono possibili due configurazioni:
- Cabla utilizzando Arduino 5V Pin
- Cabla utilizzando un'alimentazione esterna con Arduino
Cavo utilizzando Arduino 5V Pin
Il servomotore può essere alimentato utilizzando un pin Arduino 5V, ma una cosa da tenere d'occhio è che Arduino può fornire un massimo di 500 mA di corrente al servo. Se i motori assorbono corrente oltre questo limite, ripristinerà automaticamente Arduino e potrebbe anche perdere potenza.
Di seguito è riportata la rappresentazione pittorica della connessione Arduino con servomotore:
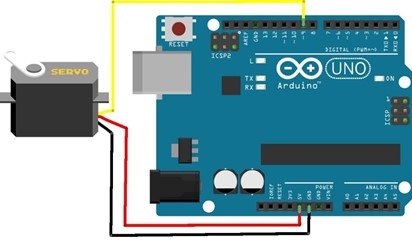
Qui il pin digitale 9 di Arduino è collegato al pin di controllo del servomotore mentre il pin di alimentazione e GND del servo è collegato rispettivamente al pin 5V e GND di Arduino.
Cablaggio tramite alimentazione esterna con Arduino
Arduino può fornire una corrente limitata ai servomotori, ecco perché è necessario collegare un alimentatore esterno. Utilizzando una fonte di alimentazione separata per i servomotori possiamo collegare tutti i motori che vogliamo con Arduino, ma tieni presente i pin digitali disponibili sulle schede Arduino. Se desideri collegare più servomotori, ti consigliamo di utilizzare gli shield Arduino Mega o Arduino che possono fornire più pin per gestire tutti i motori.
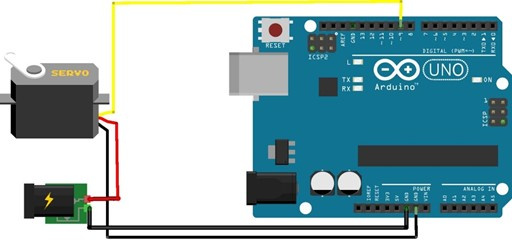
Qui l'alimentazione del servomotore e il pin di terra sono collegati tramite pin di alimentazione esterna mentre il pin di controllo è collegato al pin digitale di Arduino come nella configurazione sopra.
Conclusione
I servomotori sono un ottimo modo per progettare progetti di robotica. Grazie alla loro flessibilità per quanto riguarda i meccanismi di controllo, gli utenti Arduino hanno l'opportunità di progettare progetti di loro scelta. Un servomotore può essere collegato con un Arduino utilizzando la sua alimentazione e i pin digitali. Considerando che cercare sempre il fabbisogno energetico del motore prima di collegarlo ad Arduino. Per collegare più motori con Arduino è necessario utilizzare un alimentatore esterno.