MicroPython è ampiamente utilizzato con microcontrollori e sistemi embedded. Possiamo scrivere codice e librerie all'interno di MicroPython IDE e interfacciare più sensori. Questo articolo ti guiderà nella misurazione della distanza utilizzando l'ESP32 con sensore HC-SR04.
ESP32 con sensore a ultrasuoni HC-SR04 che utilizza MicroPython
L'interfacciamento dell'ESP32 con gli ultrasuoni richiede solo il collegamento di due fili. Utilizzando sensori a ultrasuoni, possiamo misurare la distanza dell'oggetto e attivare risposte basate su questo sistema come i sistemi di prevenzione delle collisioni dei veicoli.

Utilizzando MicroPython, che è un linguaggio progettato per ESP32 e altri microcontrollori, possiamo interfacciare più sensori come il HC-SR04 . Verrà scritto il codice MicroPython che calcola il tempo impiegato dall'onda SONAR per raggiungere dal sensore all'oggetto e tornare all'oggetto. Successivamente utilizzando la formula della distanza, possiamo calcolare la distanza dell'oggetto.
Ecco alcuni punti salienti principali del sensore HC-SR04:
| Caratteristiche | Valore |
| Tensione di funzionamento | 5 V CC |
| Corrente operativa | 15mA |
| Frequenza operativa | 40 KHz |
| La mia gamma | 2 cm/ 1 pollice |
| Portata massima | 400 cm/13 piedi |
| Precisione | 3mm |
| Angolo di misurazione | <15 gradi |
Piedinatura HC-SR04 HC-SR04 contiene quanto segue quattro perni:
- Vcc: Connettersi al pin Vin ESP32
- Terra: Connettiti a GND
- Trigger: Pin per ricevere il segnale di controllo dalla scheda ESP32
- Eco: Invia segnale di ritorno. La scheda del microcontrollore riceve questo segnale per calcolare la distanza utilizzando il tempo

Come funziona l'ultrasuono
Dopo che il sensore HC-SR04 è collegato con ESP32 un segnale al Trigger il pin verrà generato dalla scheda. Una volta ricevuto il segnale sul perno di attivazione del sensore HC-SR04, verrà generata un'onda ultrasonica che lascia il sensore e colpisce l'oggetto o il corpo dell'ostacolo. Dopo averlo colpito rimbalzerà sulla superficie dell'oggetto.
Una volta che l'onda riflessa raggiunge l'estremità di ricezione del sensore, verrà generato un impulso di segnale al pin dell'eco. ESP32 riceve il segnale del pin dell'eco e calcola la distanza tra l'oggetto e il sensore utilizzando Formula della distanza.

La distanza totale calcolata deve essere divisa per due all'interno del codice ESP32 poiché la distanza che otteniamo originariamente è uguale alla distanza totale dal sensore all'oggetto e di nuovo all'estremità ricevente del sensore. Quindi la distanza reale è il segnale che è uguale alla metà di quella distanza.
schematico
Di seguito è riportato lo schema per interfacciare ESP32 con il sensore a ultrasuoni:
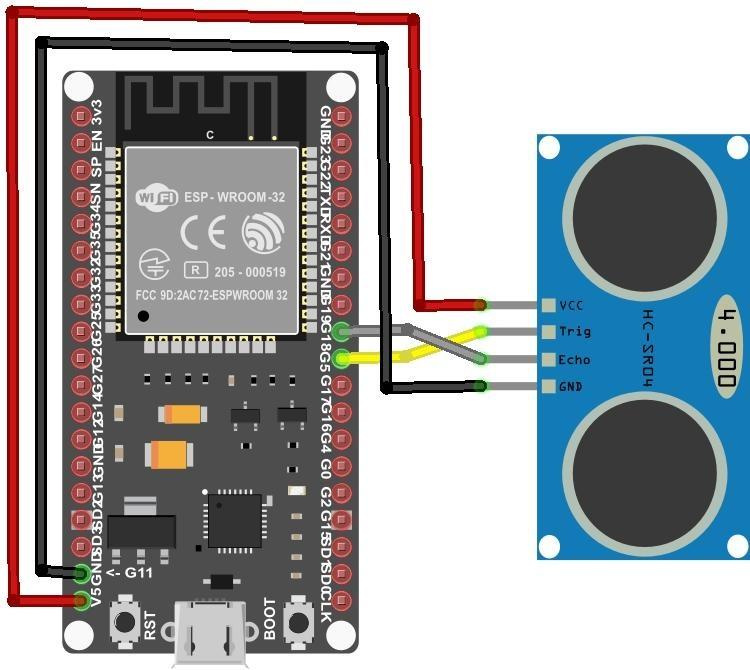
Collegare il trigger e il pin echo del sensore rispettivamente con GPIO 5 e GPIO 18 di ESP32. Collegare anche il pin ESP32 GND e Vin con i pin del sensore.
| Sensore a ultrasuoni HC-SR04 | Perno ESP32 |
| Trigger | GPIO 5 |
| Eco | GPIO 18 |
| GND | GND |
| VCC | VENIRE |
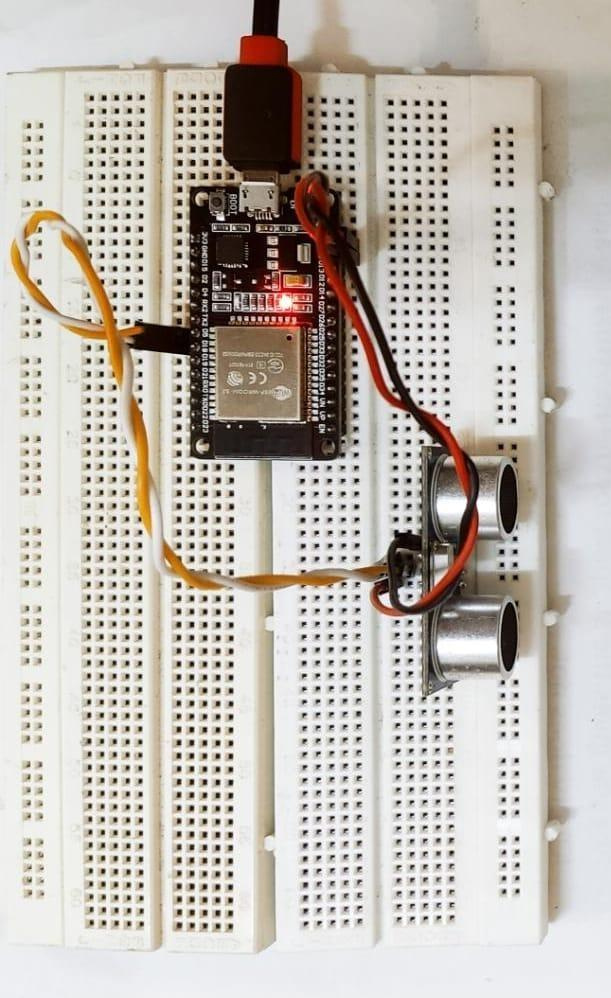
Hardware
Per programmare il sensore a ultrasuoni sono necessari i seguenti componenti:
- ESP32
- HC-SR04
- Tagliere
- Ponticelli
Come configurare Ultrasonic HC-SR04 con ESP32 utilizzando MicroPython
Prima di poter programmare ESP32 con un sensore a ultrasuoni, dobbiamo installare una libreria al suo interno. Collegare la scheda ESP32 al PC. Segui i passaggi per completare la configurazione ESP32 con sensore a ultrasuoni in Thonny IDE utilizzando MicroPython.
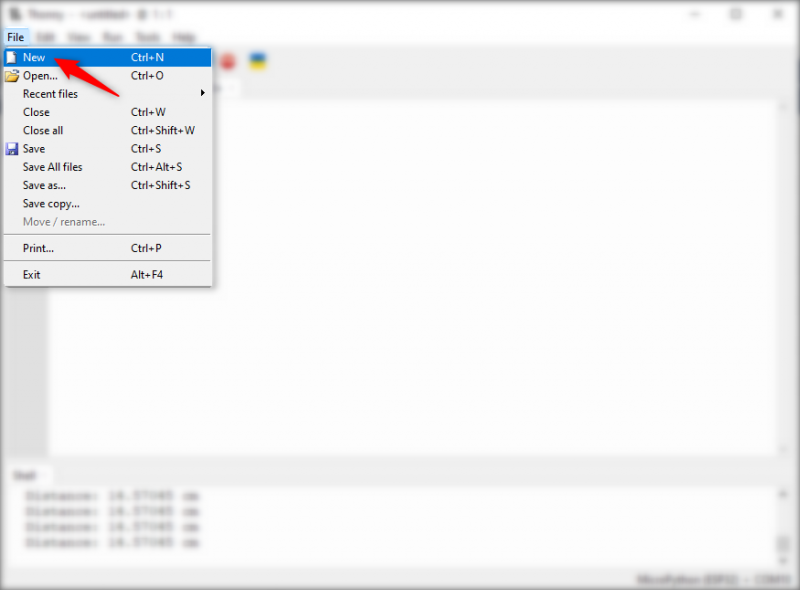
Passo 1: Ora apri Thonny IDE. Crea un nuovo file nella finestra dell'editor Vai a : File>Nuovo o premere Ctrl+N .
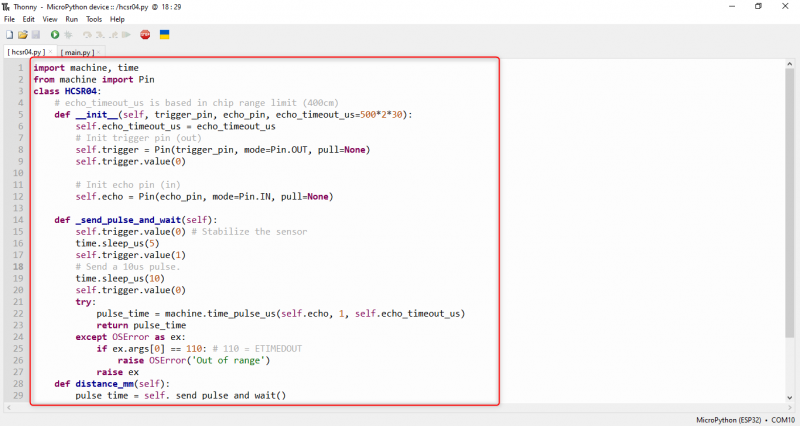
Una volta aperto il nuovo file, incolla il seguente codice nella finestra dell'editor di Thonny IDE.
importare macchina , voltada macchina importare Spillo
classe HCSR04:
# echo_timeout_us si basa sul limite della gamma di chip (400 cm)
def __piccante__ ( se stesso , trigger_pin , echo_pin , echo_timeout_us = 500 * Due * 30 ) :
se stesso . echo_timeout_us = echo_timeout_us
# Init trigger pin (fuori)
se stesso . grilletto = Spillo ( trigger_pin , modalità = Spillo. FUORI , tiro = Nessuno )
se stesso . grilletto . valore ( 0 )
# Init echo pin (in)
se stesso . eco = Spillo ( echo_pin , modalità = Spillo. IN , tiro = Nessuno )
def _send_pulse_and_wait ( se stesso ) :
se stesso . grilletto . valore ( 0 ) # Stabilizzare il sensore
volta . dormi_noi ( 5 )
se stesso . grilletto . valore ( 1 )
# Invia un impulso di 10us.
volta . dormi_noi ( 10 )
se stesso . grilletto . valore ( 0 )
Tentativo :
impulso_tempo = macchina. time_pulse_us ( se stesso . eco , 1 , se stesso . echo_timeout_us )
Restituzione impulso_tempo
tranne OSError come ex:
Se ex. arg [ 0 ] == 110 : # 110 = ETIMEDOUT
aumentare OSError ( 'Fuori dal limite' )
aumentare ex
def distanza_mm ( se stesso ) :
impulso_tempo = se stesso ._send_pulse_and_wait ( )
mm = tempo_impulso * 100 // 582
Restituzione mm
def distanza_cm ( se stesso ) :
impulso_tempo = se stesso ._send_pulse_and_wait ( )
cm = ( tempo_impulso / Due ) / 29.1
Restituzione cm
Passo 2: Dopo aver scritto il biblioteca codice all'interno della finestra dell'editor ora dobbiamo salvarlo all'interno del dispositivo MicroPython.
Passaggio 3: Vai a : File>Salva o premere Ctrl+S .
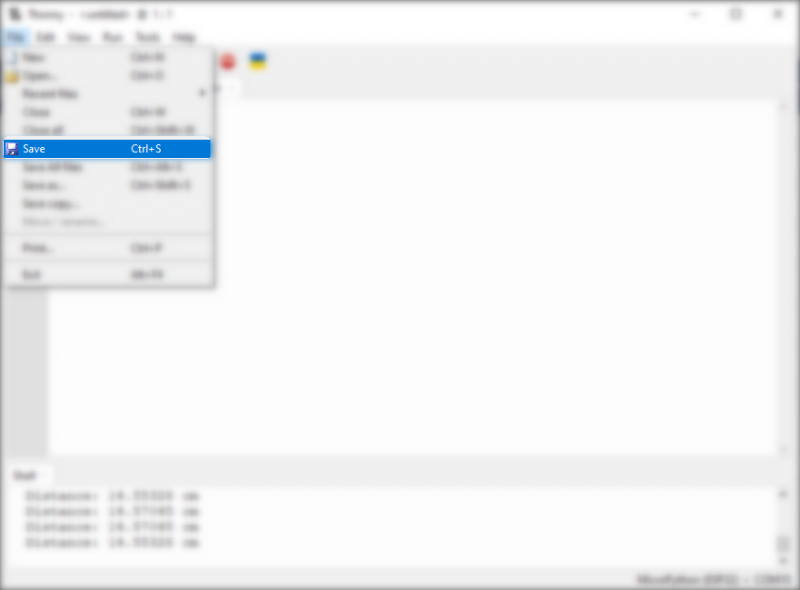
Passaggio 4: Apparirà una nuova finestra. Assicurati che ESP32 sia connesso al PC. Selezionare il dispositivo MicroPython per salvare il file della libreria.
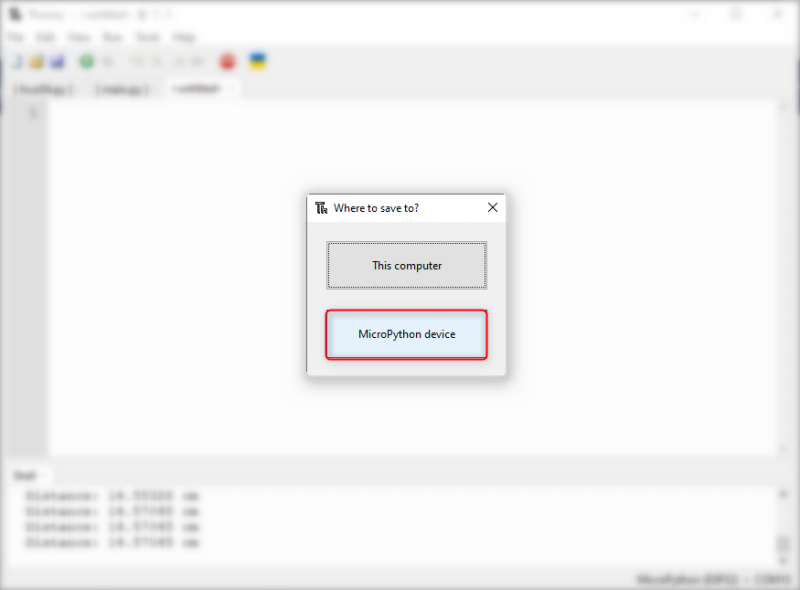
Passaggio 5: Salva il file della libreria ad ultrasuoni con il nome hcsr04.py e clicca OK .

Ora la libreria del sensore ultrasonico hcsr04 è stata aggiunta con successo alla scheda ESP32. Ora possiamo chiamare funzioni di libreria all'interno del codice per misurare la distanza di diversi oggetti.
Codice per sensore a ultrasuoni che utilizza MicroPython
Per il codice del sensore a ultrasuoni creare un nuovo file ( Ctrl+N ). Nella finestra dell'editor, inserisci il codice indicato di seguito e salvalo all'interno del file principale.py o boot.py file. Questo codice stamperà la distanza di qualsiasi oggetto che si trova davanti a HC-SR04.
Il codice è iniziato chiamando librerie importanti come HCSR04 e volta biblioteca insieme a dormire dare ritardi.
Successivamente, abbiamo creato un nuovo oggetto con un nome sensore . Questo oggetto accetta tre diversi argomenti: trigger, echo e timeout. Qui il timeout è definito come il tempo massimo dopo che il sensore esce dall'intervallo.
sensore = HCSR04 ( trigger_pin = 5 , echo_pin = 18 , echo_timeout_us = 10000 )Per misurare e salvare la distanza un nuovo oggetto denominato distanza è creato. Questo oggetto salverà la distanza in cm.
distanza = sensore. distanza_cm ( )Scrivi il seguente codice per ottenere i dati in mm.
distanza = sensore. distanza_mm ( )Successivamente, abbiamo stampato il risultato sulla shell IDE MicroPython.
Stampa ( 'Distanza:' , distanza , 'centimetro' )Alla fine viene dato un ritardo di 1 sec.
dormire ( 1 )Il codice completo è riportato di seguito:
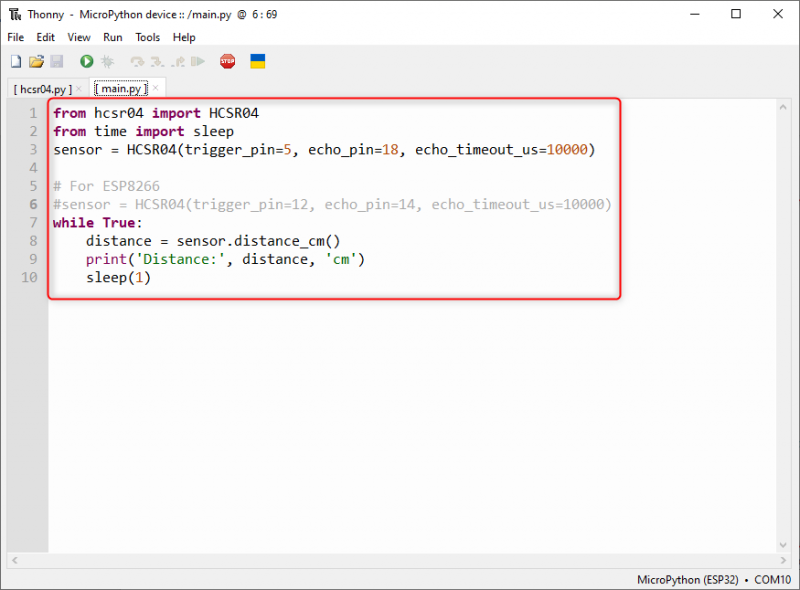
da hcsr04 importare HCSR04da volta importare dormire
#ESP32
sensore = HCSR04 ( trigger_pin = 5 , echo_pin = 18 , echo_timeout_us = 10000 )
# ESP8266
#sensor = HCSR04(trigger_pin=12, echo_pin=14, echo_timeout_us=10000)
mentre Vero :
distanza = sensore. distanza_cm ( )
Stampa ( 'Distanza:' , distanza , 'centimetro' )
dormire ( 1 )
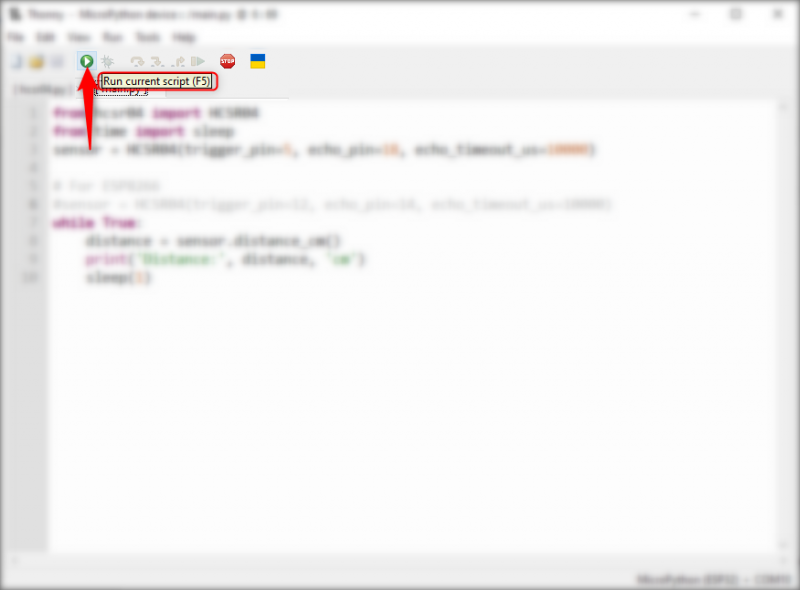
Dopo aver scritto e salvato il codice all'interno del dispositivo MicroPython, ora eseguo il sensore a ultrasuoni principale.py codice file. Fare clic sul pulsante di riproduzione o premere F5 .
Uscita del sensore a ultrasuoni quando l'oggetto è vicino
Ora posiziona un oggetto vicino al sensore a ultrasuoni e controlla la distanza misurata sulla finestra del monitor seriale di Arduino IDE.
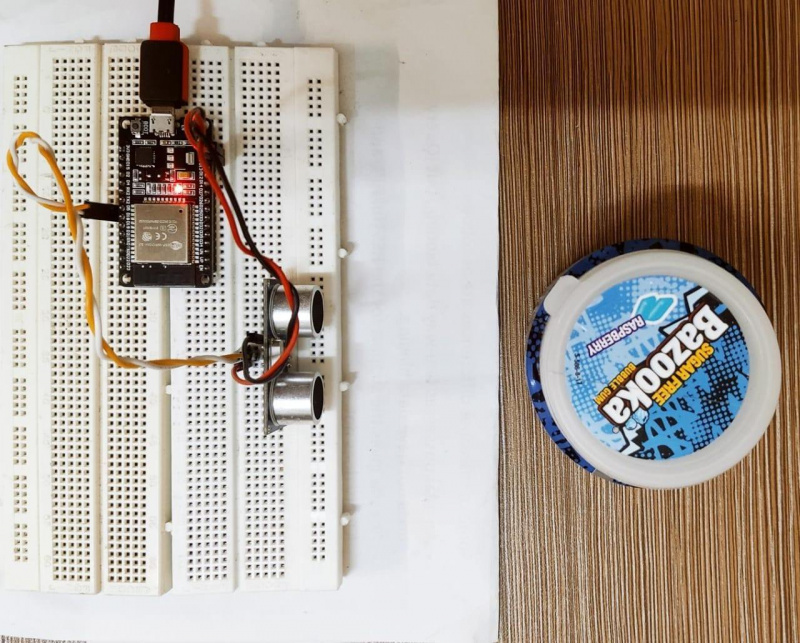
La distanza dell'oggetto è mostrata nel terminale shell. Ora l'oggetto è posizionato a 5 cm dal sensore ultrasonico.

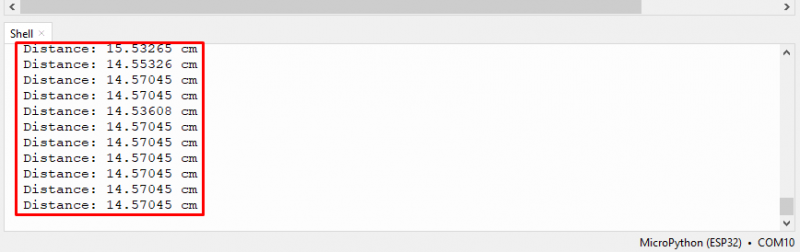
Uscita del sensore a ultrasuoni quando l'oggetto è lontano
Ora per verificare il nostro risultato posizioneremo gli oggetti lontano dal sensore e controlleremo il funzionamento del sensore ad ultrasuoni. Posiziona gli oggetti come mostrato nell'immagine qui sotto:
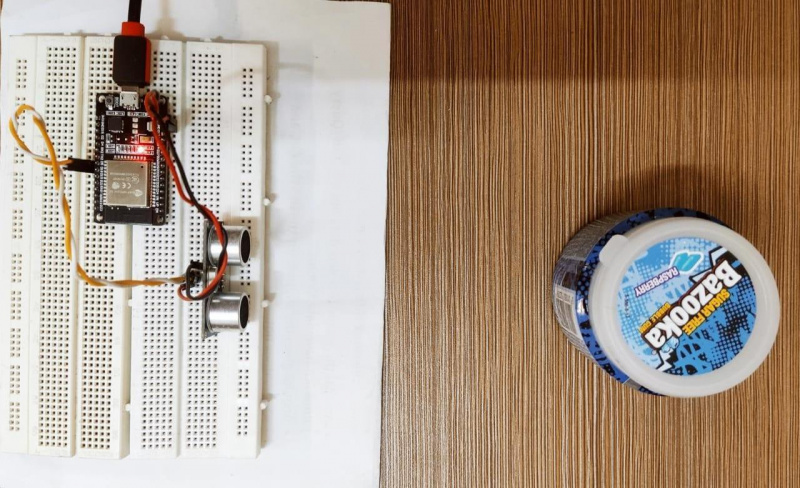
La finestra di output ci darà una nuova distanza e come possiamo vedere che l'oggetto è lontano dal sensore, quindi la distanza misurata è di ca. 15 cm dal sensore a ultrasuoni.
Conclusione
La misurazione della distanza ha una grande applicazione quando si tratta di robotica e altri progetti, ci sono diversi modi per misurare la distanza. HC-SR04 con ESP32 può misurare la distanza di diversi oggetti. Qui questo articolo coprirà tutti i passaggi necessari per integrare e iniziare a misurare la distanza con ESP32.